

기술의 필요성

현재 산업창고 내 이동기기 운영 현황(사례 : 국내외 철강제품 창고 범용 기술 기준)
- 입력 Data에 의한 정형적인 사물만 인식
- 비정형/돌발 형상 및 측정 구역 外 형상 인지/측정 불가 (창고/야드 內 적치 소재/물품, 비정형 형상 및 돌발 형상 측정불가)
- 기기 작업 상태의 실시간 모니터링 및 데이터기반 향상 불가

기존 기술 대비 차별성
| 구 분 | 기존 형상 인식 장치 | 개발 기술 | 비고 |
|---|---|---|---|
| Laser Scanner Type | Deep Learning 머신 비전 | ||
| 측정 기기 |
|
카메라(2기) | |
| 원리 | 스캐닝을 통한 거리/위치 측정 | Deep Learning 형상인식을 통한 형상/좌표 및 작업환경 측정 | |
| 측정 대상 | 정해진 위치에서의 정해진 물체(코일) | 영상 내 모든 물체 (설정 및 학습에 따름) | |
| 설치 위치 |
|
|
|
| 측정 값 | 측정 대상체 높이 및 폭 |
|
|
| 활용 방식 | 측정값을 이동기기 제어 PLC로 전송하여 크레인 작업 좌표 환산 (작업 이전) |
|
|
| 중점 사항 |
|
|
기술개요

철강 제품 창고 사례
 사람/ 차량 / 코일
사람/ 차량 / 코일  슬라브 (상판 및 측면)
슬라브 (상판 및 측면)
*형상 감지 /인식 및 인식율 : 적중율 98% 이상
위험상황 감지 및 안전 예방 (i.e., 작업 환경 내 사람 감지)

기술 적용 가능 범위
-
철강 제품창고 무인화/자동화
 코일/슬라브 형상측정 및 좌표인식
코일/슬라브 형상측정 및 좌표인식
-
제철 고위험공정 무인화/자동화
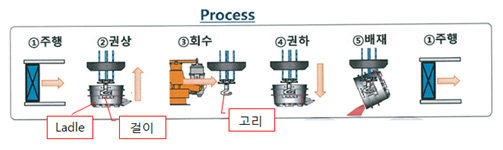 제강공장 Ladle 이송 공정 설비 상태/좌표 인식
제강공장 Ladle 이송 공정 설비 상태/좌표 인식
-
산업 이동기기 무인화/충돌 회피
 복수의 AGV 및 이송기기 간 충돌 회피
복수의 AGV 및 이송기기 간 충돌 회피
-
자동화 기기 효율 향상
 코일 자동 포장기기/로봇 작동 제어
코일 자동 포장기기/로봇 작동 제어